
Recently, I had a friend whose drone wobbled from side to side while flying and didn’t follow a straight path. So he wanted us to help him solve his drone vibration problem by analyzing the vibration data.
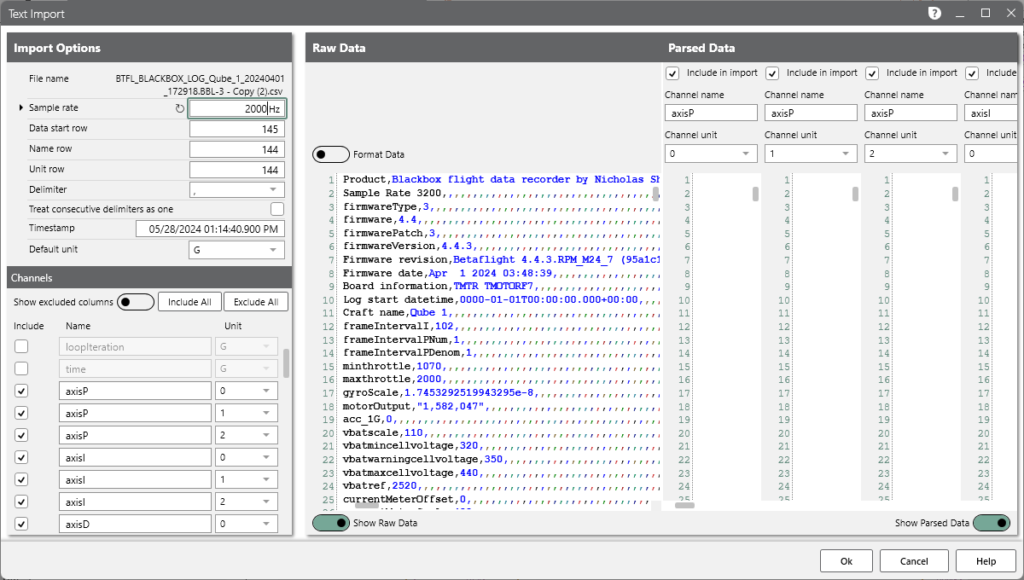
The drone is capable of recording up to 16MB of flash capacity at a frequency of 8kHz. The user recorded the flight data and opened a CSV file in ObserVIEW for analysis. Although the sampling rate is not included in the data, it can be added manually by the user in the CSV import tool and is known to be 2,000Hz. The Text Import feature enables engineers to import almost any text or CSV file into ObserVIEW and define information such as the sample rate and channel units of the waveform in the process.
The initial data file contains a lot of diagnostic information, but the purpose of the user is to compare the RC command with the gyroscope data to analyze the relationship between the two. The RC command is the command issued by the controller to the drone, while the gyroscope is used to measure the orientation of the drone. When the controller issues a command, the drone should react accordingly and execute that command.
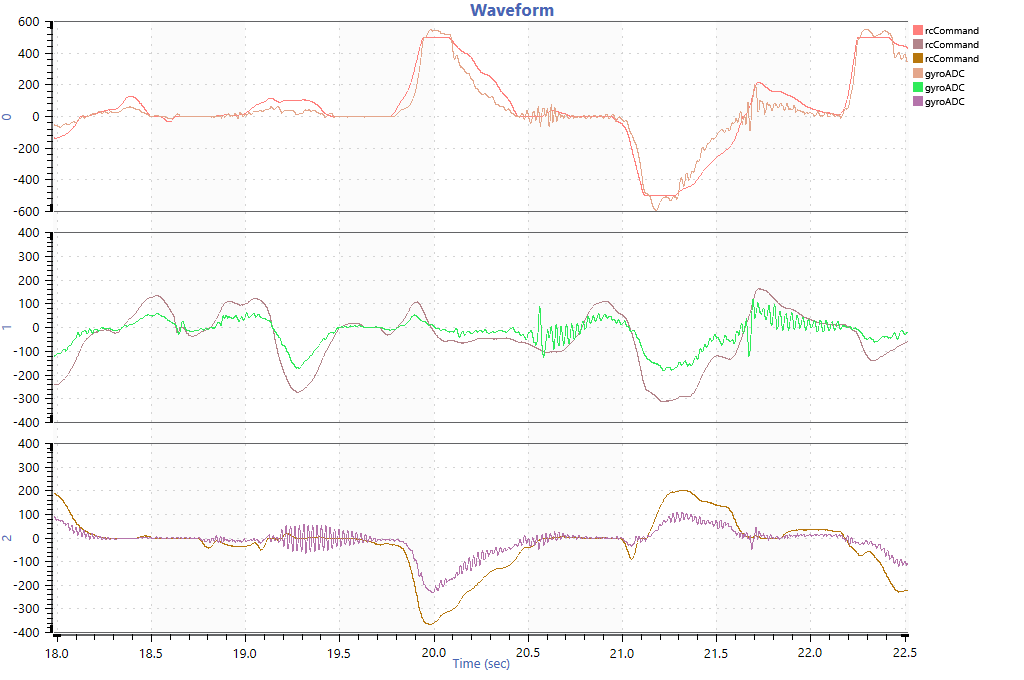
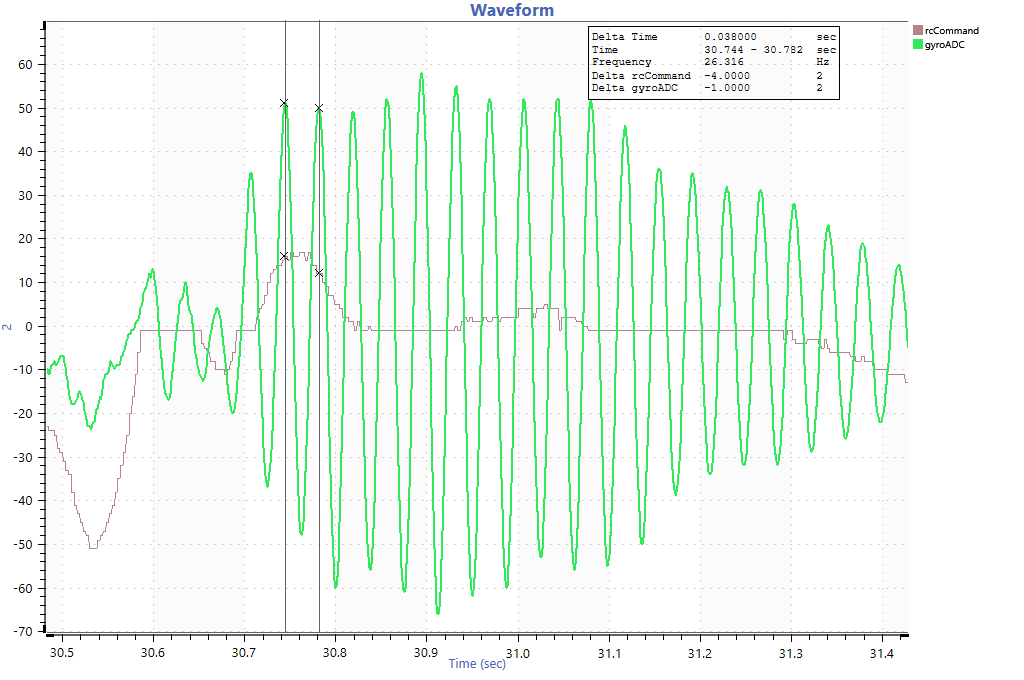
Using the time waveform, the user found that the pitch and roll of the drone were consistent with the RC command, but the yaw (or turn) was not. They amplified the oscillating portion of the yaw plot and used an incremental cursor to find the oscillation frequency (peak-to-peak value), which was about 26Hz. Spectral analysis data further confirmed the existence of such low-frequency oscillations.
The vibration is caused by the resonance action in the frame and its transmission to the gyroscope chip. The user has adjusted the installation of the gyroscope and the electronic speed control Settings. They modified the soft mounting of the flight control board to reduce the transmission between vibration and frame resonance. With these adjustments, they managed to mitigate the vibration. In addition, changes to some Settings of the electronic speed control further suppressed vibration.
By comparing the data before and after the changes, the user confirms that the adjustments have indeed improved the oscillation.